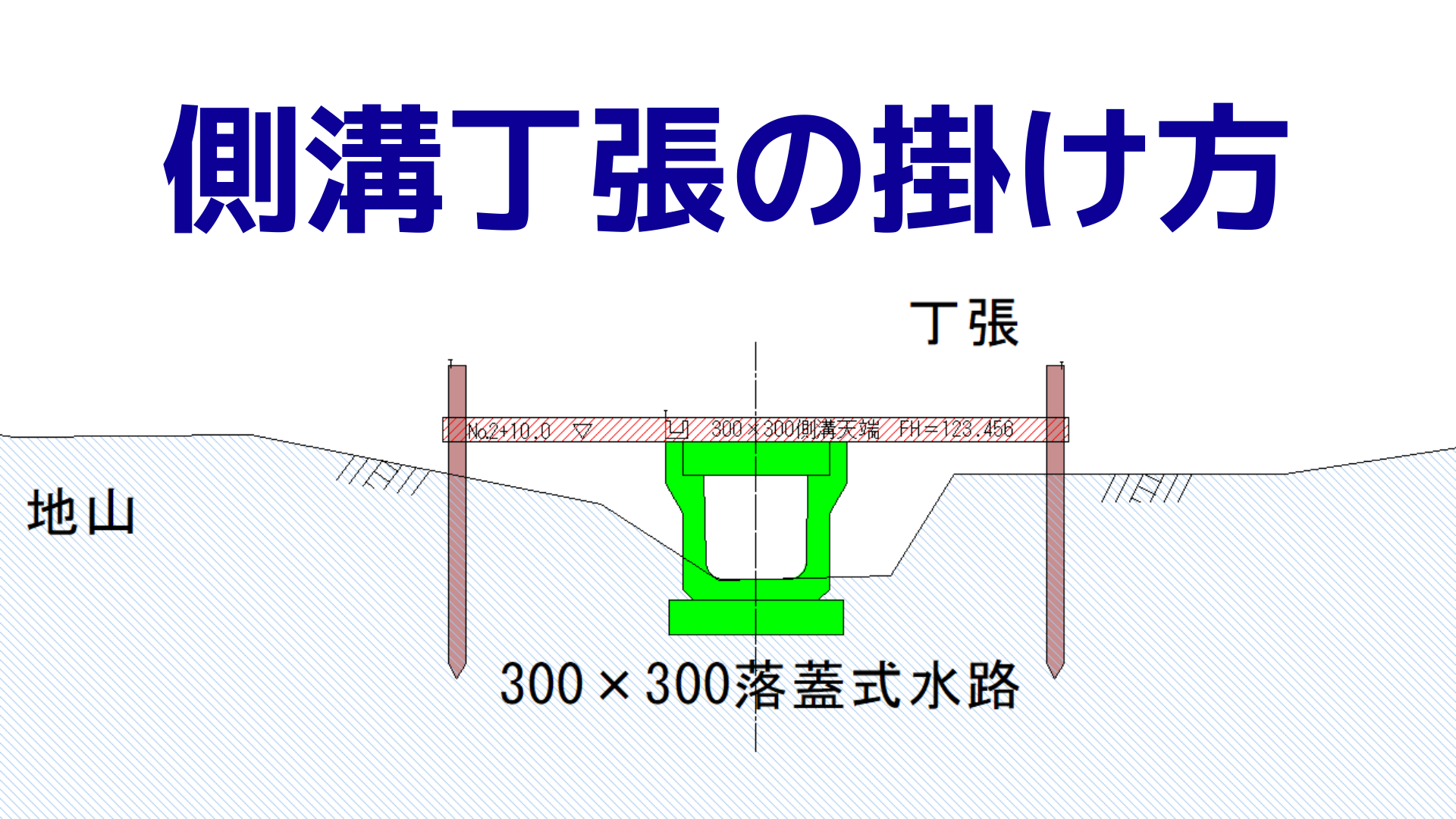
【側溝丁張】の掛け方を分かりやすく解説します!
まさあき
建設ナビ
測量現場で「器械点の座標を求めたい」と思ったときに役立つのが後方交会法です。
しかし、実際に計算しようとすると…
こんな課題を感じたことはありませんか?
そこで今回、スマホやPCからそのまま使える「後方交会法・2点3点計算アプリ」を作成しました。
インストール不要、完全無料。ブラウザで開くだけで、現場ですぐに計算できます。
公開URLアプリの入手はここから
↓
このアプリは、後方交会法によって器械点(P)の座標を計算し、さらに杭打ち計算まで行えるWebアプリです。
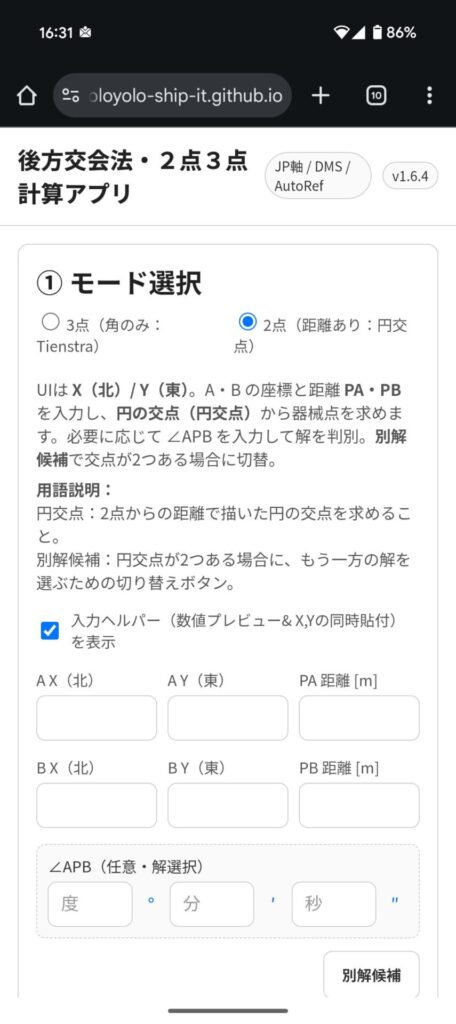


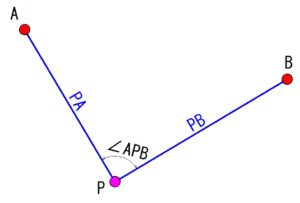
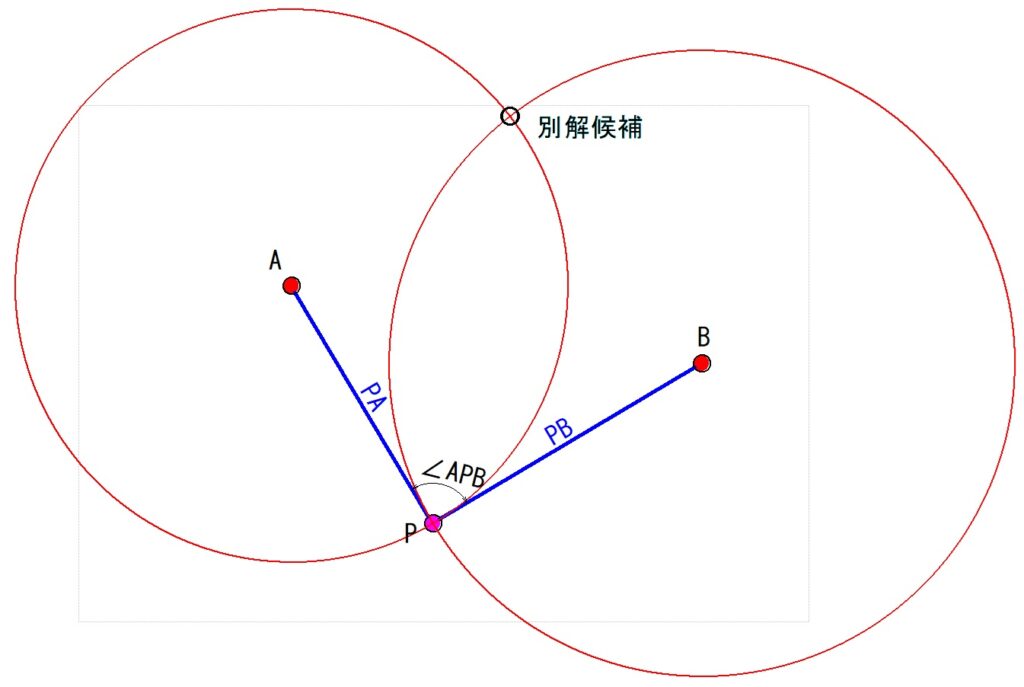
「2点モード(距離あり・円交点)」は、器械点から2つの既知点までの距離を使って器械点を求める方法です。
アプリでは交点の候補切替やエラーガイドまでサポートしてくれます。

画面上部で「2点(距離あり:円交点)」を選びます。
このアプリでは、入力ヘルパー機能に「X座標(北)とY座標(東)をまとめて一度に貼り付けできる」仕組みを入れてあります。
測量データやCSVなどからコピーするとき、多くはスペースやカンマで区切られている形式ですよね。
12345.678 , 98765.432
この値をそのままAXの入力欄にペーストします。
自動で「12345.678」をAXに、「98765.432」をAYに振り分けます。
AY欄にカーソルを移動してペーストし直す必要がありません。
PA、PB(器械点からA,Bまでの水平距離)を入力します。
この状態で「計算する」をクリックしても器械点Pの座標を計算できますが、2つの答えになります。そこで ∠APB を入力すると、2つの候補から正しい交点を自動で判別します。


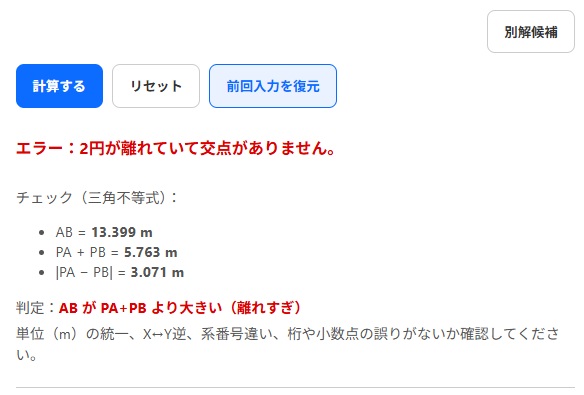
アプリでは、AB, PA+PB, |PA−PB| の値と原因・調整目安 を表示するので、「なぜ計算できないか」が一目でわかります。
公開URLアプリの入手はここから
↓

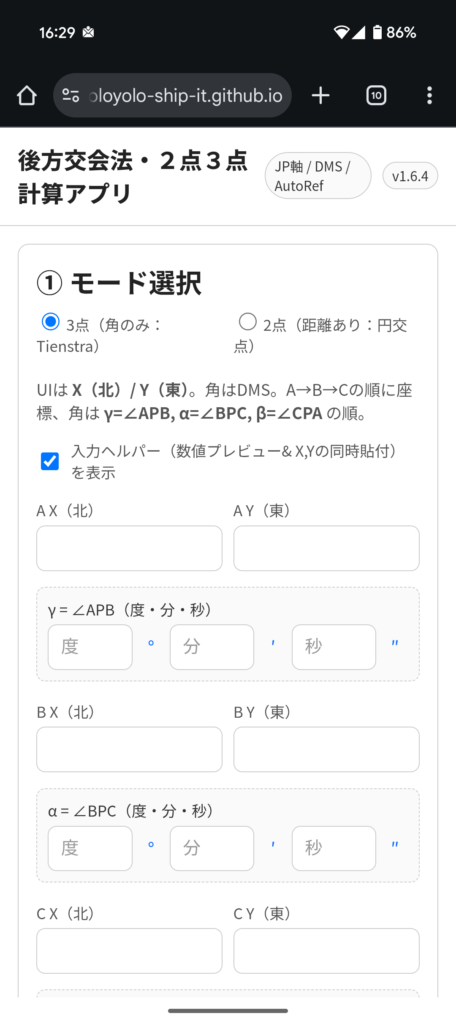
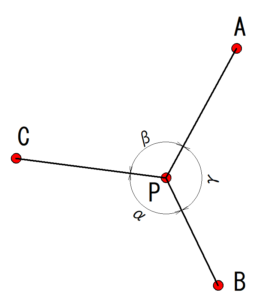
「3点モード(角のみ:Tienstra法)」は、既知点が3つ(A,B,C)あり、それらの角度を観測して器械点Pの座標を求める方法です。
Tienstra(ティエンストラ)式は、後方交会法の代表的な計算式のひとつで、「角度3つと座標3つがあれば器械点Pを求められる」というシンプルな方法です。
計算式は少し複雑ですが、アプリが自動で処理してくれます。
手計算や電卓でやると大変なものを、ワンクリックで算出できるのが大きなメリットです。
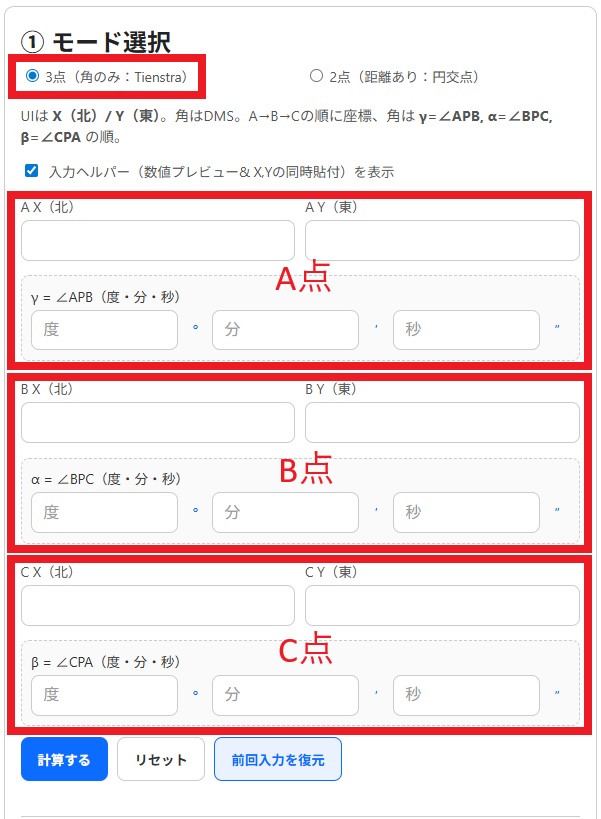
A,B,Cの 座標(X=北, Y=東) を入力します。
γ=∠APB, α=∠BPC, β=∠CPA を「度・分・秒(DMS)」で入力します。
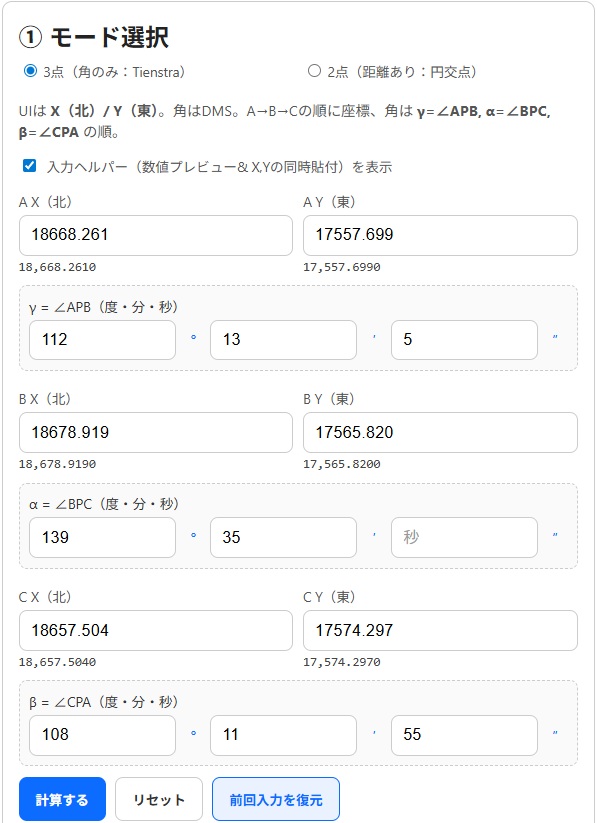
「計算する」を押すと、器械点Pの 座標X,Y が表示されます。
さらにアプリは 三角形ABCの内角チェック も行い、観測角度の合計(α+β+γ)が360°(0°)に近いかどうか確認できます。

エラー例
このアプリ【後方交会法】には「2点モード(距離あり・円交点)」と「3点モード(角のみ:Tienstra法)」があるので、どちらを使えばいいのか分かりやすいように、比較表にまとめました。
| 項目 | 2点モード(距離あり:円交点) | 3点モード(角のみ:Tienstra法) |
|---|---|---|
| 必要な既知点 | 2点(A・B) | 3点(A・B・C) |
| 観測データ | PA・PB(P→A, P→Bの水平距離)+任意で ∠APB | 角度:γ=∠APB、α=∠BPC、β=∠CPA(DMS) |
| 計算の原理 | PA・PB を半径とする 2円の交点を求める | Tienstra式(角度の三角比による演算) |
| 結果 | P の座標(X,Y)※交点が2つ出る場合あり | P の座標(X,Y)※解は一意 |
| エラー例 |
・AB > PA+PB(円が離れて交わらない) ・AB < |PA−PB|(一方が他方を内包) ・AB ≒ PA+PB または AB ≒ |PA−PB|(接して不安定) ・A と B が同一点/極端に近接 ・PA・PB が水平距離でない等の入力ミス |
・観測角の合計 α+β+γ ≠ 360° ・角の割当て誤り(γ=∠APB, α=∠BPC, β=∠CPA の取り違え) ・A, B, C がほぼ一直線(△ABC が極小)で数値不安定 ・DMSの桁ズレ/度分秒入力ミス |
| アプリのサポート | 「別解候補」で交点切替/エラー原因と調整目安を自動表示 | △ABC 内角チェック/α+β+γ の合計確認 |
| 利用シーン | 既知点が2つあり距離測定が容易 | 既知点が3つ見えて角度観測が主体 |
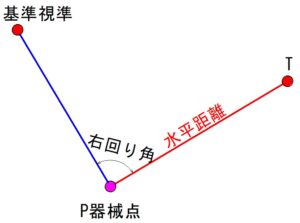
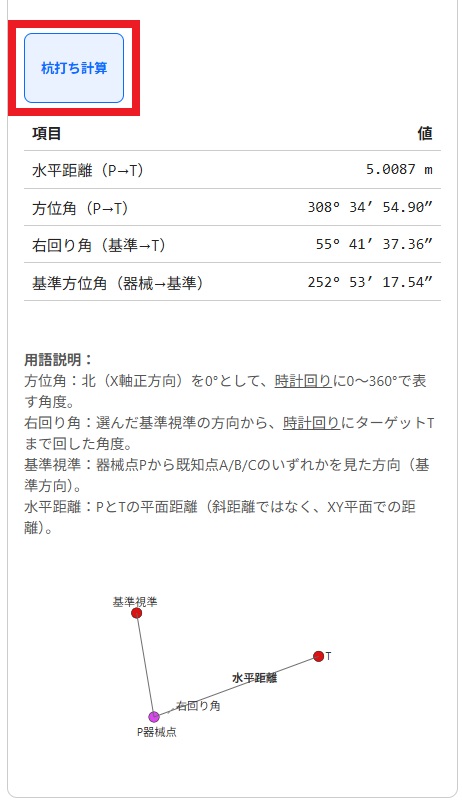
「杭打ちモード」は、器械点(P)の座標が求まったあとに、現地で新しい点を設置するための機能です。
具体的には、器械点Pからターゲット点Tまでの
を計算します。
これにより、現場で正確にターゲット点を杭打ちできます。

この「後方交会法・2点3点計算アプリ」は、
という特長を備えています。
ぜひ現場で試してみてください。
公開URLアプリの入手はここから
↓
免責:本ソフトは「現状のまま」提供します。正確性・特定目的適合性・権利非侵害など一切保証しません。利用により生じたいかなる損害についても、法律で許される最大限の範囲で作者は責任を負いません。各自の判断と自己責任でご利用ください。

|
にほんブログ村 |
にほんブログ村 |
にほんブログ村 |